

Los investigadores de University College London (UCL) han logrado un importante avance, desarrollando un nuevo sistema acústico que permite a los robots transportar objetos de manera colaborativa, y los resultados relacionados se describen en un artículo publicado en el servidor de preimpresión arXiv. Este sistema, inspirado en el comportamiento de transporte colectivo de insectos como las hormigas, utiliza ondas sonoras de alta frecuencia para lograr el transporte de objetos sin contacto en el aire por parte de robots, mostrando un enorme potencial en la ejecución de tareas complejas.
Actualmente, aunque la mayoría de los robots se despliegan individualmente, como equipo, su velocidad y eficiencia en la ejecución de tareas complejas son asombrosas. El nuevo sistema robótico acústico propuesto por los investigadores de UCL se basa precisamente en esta idea, con el objetivo de mejorar la eficiencia y adaptabilidad del transporte a través de la colaboración robótica.
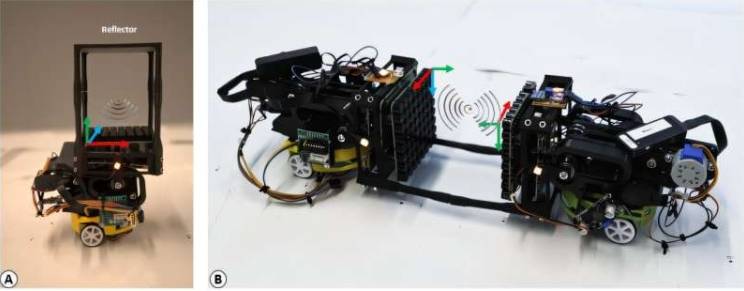
Los autores del artículo, Narsimlu Kemsaram, Akin Delibasi y sus colegas, señalaron que el transporte colaborativo es común en sistemas biológicos como colonias de hormigas, mejorando significativamente la eficiencia y adaptabilidad en entornos dinámicos. Inspirados en esto, diseñaron un sistema de transporte colaborativo que depende de transductores de ultrasonido y un sistema de control robótico integrado. Los transductores de ultrasonido generan patrones de interferencia en el aire, formando campos de presión sonora que pueden capturar, suspender y mantener objetos pequeños, mientras que el sistema de control genera estos campos de sonido en posiciones específicas, logrando una manipulación de objetos de alta precisión.
El equipo de investigación diseñó dos estrategias de transporte de objetos: transporte independiente y transporte colaborativo. En el modo de transporte independiente, un solo robot acústico puede mover objetos sin contacto físico; en el modo de transporte colaborativo, múltiples robots cooperan para mover objetos en el aire, imitando el comportamiento de grupos de insectos. A través de prototipos de robots acústicos desarrollados por ellos mismos, el equipo de investigación verificó la viabilidad del sistema en una serie de experimentos reales y probó estas dos estrategias.
Los resultados experimentales indican que el sistema puede suspender objetos de manera estable y lograr un transporte eficiente y preciso. Los investigadores evaluaron la estabilidad de suspensión mediante micrófonos, la eficiencia de transporte mediante un sistema de captura de movimiento en espacio de fase, y la precisión de sincronización de reloj mediante un osciloscopio, verificando exhaustivamente el rendimiento del sistema.
Mirando hacia el futuro, este sistema se espera que se verifique en experimentos más amplios para evaluar aún más su potencial para resolver problemas prácticos. Los investigadores indicaron que este nuevo sistema robótico acústico tiene perspectivas de aplicación importante en campos como el procesamiento y transporte eficiente de materiales, microensamblaje de equipos y productos, y aplicaciones biomédicas, trayendo nuevas oportunidades de desarrollo al campo de la fabricación de equipos de alta gama.