

La inspección de puentes es una de las tareas más pesadas y peligrosas en el mantenimiento de infraestructuras civiles a nivel mundial. En zonas ciegas sin señal GPS, como vigas cajón elevadas, estribos de pilas de puentes y alcantarillas bajo el puente, la inspección manual tradicional enfrenta problemas de alto riesgo operativo, numerosos ángulos muertos visuales y baja eficiencia. Una investigación reciente de la Universidad de Zhejiang, en colaboración con la Universidad de Ciencia y Tecnología Electrónica de Hangzhou y otros equipos, propone QRIVAS (Sistema de Captura Visual Inteligente para Robots Cuadrúpedos), que permite que el robot, sin depender en absoluto de mapas ni información previa del entorno, realice exploración autónoma, identificación precisa y captura de imágenes de cobertura completa de componentes clave del puente. En el entorno de simulación, la tasa de éxito de navegación alcanza el 100%, y en la inspección real de componentes de puentes, la tasa promedio de éxito de navegación de tareas es del 96,7%.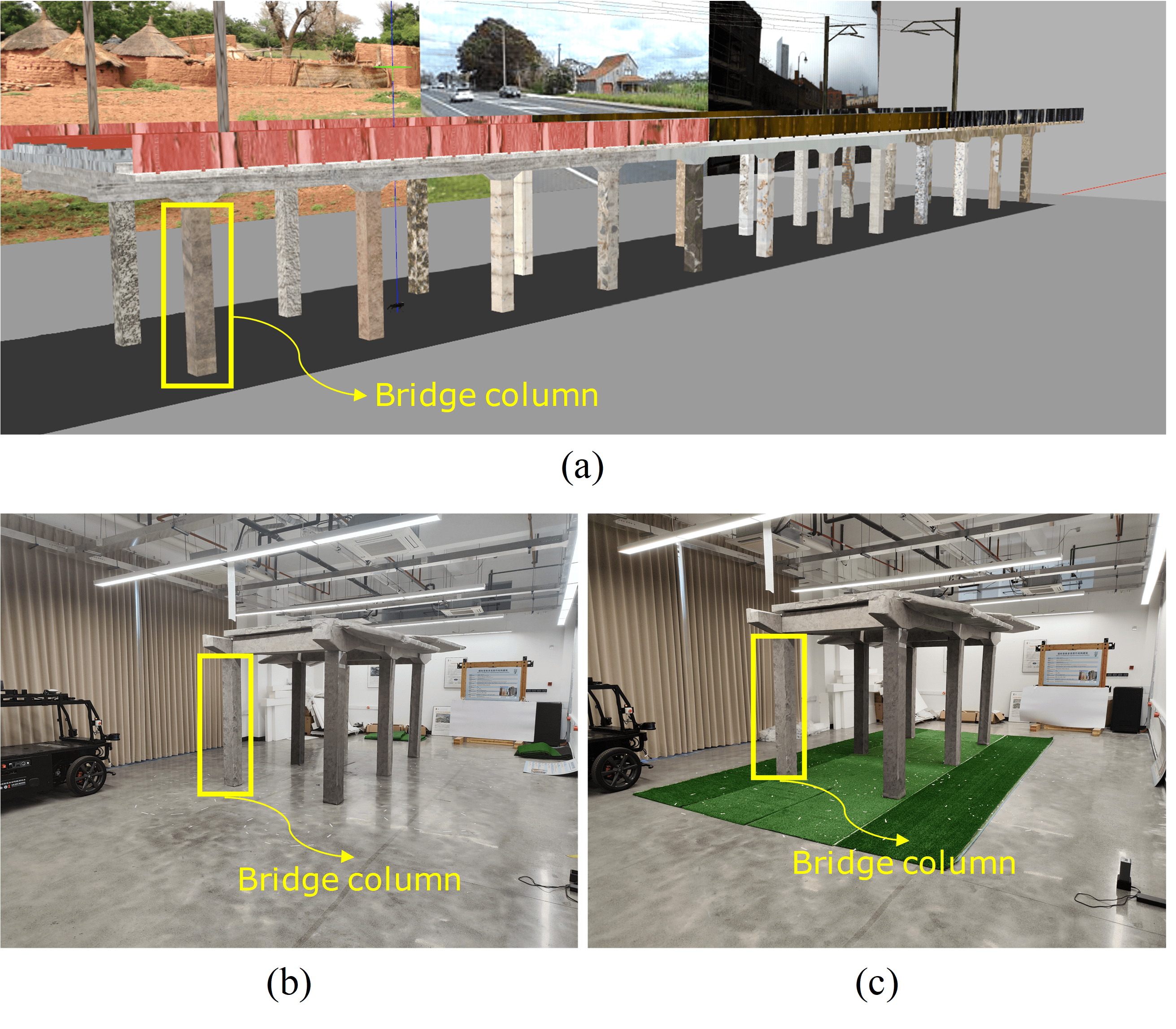
El "dilema de los puntos ciegos" en la inspección de puentes
Los puentes son nodos clave del sistema de transporte, y el monitoreo de su salud estructural está directamente relacionado con la seguridad pública y la vida útil de la ingeniería. Componentes clave como pilas, vigas de coronación y fondos de vigas a menudo se encuentran en el interior de vigas cajón, en la base de pilas o en alcantarillas subterráneas donde la señal GPS no llega, y carecen de textura e iluminación estable. La inspección manual tradicional requiere andamios, plataformas de trabajo aéreo o incluso escalada, lo que conlleva enormes riesgos de seguridad. Por ejemplo, un túnel de aproximadamente 11 km de longitud requiere casi 22 horas para una sola inspección manual. Al mismo tiempo, los drones tienen dificultades para operar de manera estable bajo el puente y en espacios cerrados debido a la falta de GPS y turbulencias de aire.
La mayoría de los esquemas de inspección robótica existentes dependen de mapas de alta precisión preconstruidos, pero en entornos desconocidos sin información previa (como la primera inspección después de la construcción de un puente nuevo o la inspección de emergencia después de un desastre), el costo de construir mapas previamente es extremadamente alto, el ciclo es largo e incluso puede ser imposible obtenerlos. Por lo tanto, cómo lograr navegación autónoma y captura visual de alta precisión en condiciones extremas sin mapa, sin GPS, con textura débil y baja iluminación se ha convertido en un problema central que debe resolverse urgentemente en la intersección de la ingeniería civil y la robótica.
Cuando el robot cuadrúpedo aprende a "tocar como un ciego"
El 20 de mayo de 2026, la Universidad de Zhejiang, en colaboración con la Universidad de Ciencia y Tecnología Electrónica de Hangzhou, Shanghai Jianke Testing Co., Ltd. y otras instituciones, publicó resultados de investigación en el Journal of Field Robotics, proponiendo por primera vez el sistema QRIVAS: un marco autónomo para robots cuadrúpedos que integra SLAM LiDAR 3D y segmentación semántica en tiempo real. Este sistema, sin depender de mapas previos, logra exploración autónoma, identificación precisa y captura de imágenes de cobertura completa de componentes clave del puente, llenando un vacío técnico en la navegación autónoma en entornos extremos dentro del campo de la inspección inteligente de ingeniería civil.
Punto destacado 1: SLAM LiDAR 3D lidera la navegación autónoma y la construcción de mapas
El equipo de investigación montó un LiDAR Ouster OS1-64 de 64 líneas en la plataforma del robot cuadrúpedo. Mediante la tecnología SLAM LiDAR 3D (Localización y Mapeo Simultáneos), el robot percibe el entorno en tiempo real en entornos sin señal GPS y con suelo de textura débil, construye simultáneamente un mapa de nube de puntos 3D de alta precisión y calcula su propia pose. Esta es la primera vez que un robot cuadrúpedo integra profundamente la navegación SLAM con el reconocimiento semántico en un entorno de ingeniería civil, superando el cuello de botella de la deriva de localización causada por la textura débil y la baja iluminación en espacios cerrados como el interior de vigas cajón.
Punto destacado 2: La segmentación semántica en tiempo real permite que el robot "vea" las pilas del puente
Simultáneamente a la navegación en tiempo real, el equipo implementó una red de segmentación semántica en tiempo real eficiente y ligera para etiquetar semánticamente a nivel de píxeles componentes clave como pilas, vigas de coronación y fondos de vigas en la nube de puntos LiDAR. QRIVAS acopla profundamente la planificación de la ruta de navegación con la identificación de componentes, permitiendo que el robot no solo "sepa dónde está", sino también "sepa qué debe fotografiar" y "desde qué ángulo debe hacerlo".
Este diseño permite que el robot, al explorar entornos desconocidos, ajuste dinámicamente la postura de observación, asegurando una imagen multivista y de cobertura completa de los componentes objetivo, evitando el problema crónico de puntos ciegos en la inspección debido a la forma compleja de los componentes en las rutas fijas tradicionales.
Punto destacado 3: Descomposición autónoma de tareas sin mapa previo
El avance central de QRIVAS es que abandona por completo la dependencia de mapas previos. El sistema descompone la compleja tarea de inspección de componentes de puentes en tres subtareas ejecutadas de forma autónoma: exploración espacial (el robot planifica de forma autónoma la ruta de cobertura en áreas desconocidas), identificación de componentes (localiza la posición y orientación de los componentes objetivo según los resultados de la segmentación semántica) y recopilación de información (ajusta automáticamente la posición y postura para capturar imágenes de las partes clave de los componentes). El robot construye el mapa simultáneamente mientras ejecuta la tarea, sin necesidad de intervención humana ni trayectorias predefinidas.
Punto destacado 4: Alta robustez bajo terreno extremo y tolerancias estrictas
El equipo realizó una validación sistemática en un entorno de simulación de un viaducto ferroviario de hormigón y en un modelo físico de pila de puente a escala reducida (1:3). Los resultados experimentales son un hito: en el entorno de simulación, QRIVAS logró una tasa de éxito de navegación autónoma del 100%; en el modelo de pila real, en inspecciones repetidas de seis pilas independientes, la tasa promedio de éxito de navegación de tareas alcanzó el 96,7%.
Especialmente crucial es que el sistema se mantuvo estable en dos condiciones operativas extremas: primero, en suelo de hormigón plano, su robustez superó las pruebas estrictas con radios de tolerancia de navegación de 25 cm y 50 cm, superando las soluciones técnicas existentes; segundo, completó con éxito toda la inspección autónoma en un entorno de césped artificial rugoso, un terreno típicamente blando y accidentado, demostrando la excelente capacidad de adaptación al terreno del robot cuadrúpedo.
De "persona en un callejón sin salida" a "robot en un callejón sin salida"
La dificultad técnica de la inspección de puentes no es solo "ver", sino también "entrar" y "fotografiar con precisión". La base de las pilas de puentes a menudo tiene un entorno complejo en la unión con el suelo, y el espacio en las zonas de estribo es extremadamente limitado, problemas que han restringido durante mucho tiempo el desarrollo de la inspección automatizada.
La ruta técnica de QRIVAS, mediante un diseño integrado de percepción y decisión cooperativa del robot, logra un ciclo cerrado de "acción es construcción de mapa, construcción de mapa es decisión": cada paso que da el robot, los datos de escaneo LiDAR en tiempo real fluyen al módulo SLAM, actualizando el mapa local; el módulo de segmentación semántica identifica los componentes objetivo del mapa; el módulo de planificación de ruta ajusta el ángulo de observación y el punto de apoyo del siguiente paso en consecuencia. Este mecanismo de decisión en tiempo real y basado en tareas permite que QRIVAS complete una inspección de cobertura completa incluso en entornos sin información previa, proporcionando un marco de sistema reutilizable para la "exploración autónoma en entornos desconocidos" en el campo de la ingeniería civil.
Desde las pilas de puentes, cubriendo la inspección de todo el puente y todo el espectro de infraestructura
1. Superar los puntos ciegos de la inspección tradicional, logrando una detección "sin puntos ciegos" en pilas y el interior de vigas cajón
La inspección del espacio en la base de vigas cajón y pilas es la más difícil y peligrosa. La validación exitosa de QRIVAS aporta una solución automatizada para estos dos tipos de componentes más problemáticos. El robot puede adentrarse en cavidades estrechas de vigas cajón elevadas, construir mapas de forma autónoma, localizarse y capturar imágenes del fondo de la viga en espacios completamente oscuros y sin textura, reemplazando por completo el trabajo manual en altura tradicional.
2. De "inspección individual" a "cooperación en formación": sistema de inspección inteligente tierra-aire integrado
QRIVAS y la inspección con drones forman una complementariedad técnica perfecta. Los espacios bajo el puente y las cavidades cerradas a los que los drones no pueden acceder son inspeccionados de forma detallada por el robot cuadrúpedo; mientras que los drones se encargan de establecer rápidamente un mapa 3D macro del puente, proporcionando información de navegación global para el robot. La cooperación de ambos puede constituir un sistema de inspección inteligente sin puntos ciegos, desde lo macro hasta lo micro, para grandes puentes.
3. Reparación de emergencia en desastres: acceso inmediato a áreas de puentes después de terremotos donde no se puede trabajar
En escenarios extremos como después de terremotos o inundaciones, los puentes están dañados y su estado estructural es desconocido, y la entrada manual conlleva enormes riesgos de seguridad. La capacidad autónoma sin mapa de QRIVAS tiene un valor único en escenarios de emergencia posteriores a desastres, ya que puede desplegarse inmediatamente en entornos de rescate completamente desconocidos, capturar rápidamente imágenes de daños estructurales y transmitirlas, proporcionando información clave de primera mano para la toma de decisiones en reparaciones de emergencia.
4. Transferencia tecnológica: cobertura completa desde puentes hasta túneles, galerías subterráneas y edificios de gran altura
El marco técnico central de este sistema (SLAM LiDAR 3D + segmentación semántica en tiempo real + descomposición autónoma de tareas) tiene una fuerte capacidad de transferencia entre escenarios. En la inspección de túneles, el robot cuadrúpedo puede navegar de forma autónoma en túneles largos sin GPS para capturar imágenes del revestimiento; en galerías subterráneas urbanas (como la galería informática "ciudad subterránea" en la Nueva Área de Xiong'an), puede completar una inspección autónoma completa en espacios sin luz y sin señal; también puede realizar tareas similares en espacios confinados como torres de pilares elevados y grandes tanques de almacenamiento, ampliando significativamente los límites de aplicación de la inspección con drones y robots.
De "persona en peligro" a "perro inteligente"
El valor profundo de esta investigación radica en redefinir el paradigma de automatización de la inspección en ingeniería civil. Desde el nacimiento de la ingeniería moderna de puentes, "montar andamios", "escalar alturas" y "meterse en espacios estrechos" han sido costos inevitables en la inspección estructural; la validación exitosa de QRIVAS demuestra que, bajo las cuatro condiciones más estrictas (sin mapa, sin GPS, textura débil y baja iluminación), un robot cuadrúpedo aún puede completar de forma independiente tareas de inspección de alta calidad. Esto marca un paso clave en la transición histórica de la inspección en ingeniería civil de "centrada en el ser humano" a "centrada en robots inteligentes".