A pesar de los constantes avances en robótica, la mayoría de los robots existentes aún luchan por manipular objetos de manera flexible como los humanos y poseer capacidades de percepción, lo que limita su rendimiento en diversas tareas prácticas, especialmente en entornos de alta temperatura como acerías y fundiciones, donde el calor reduce el rendimiento de los robots y afecta la precisión operativa.
Recientemente, investigadores de la Universidad del Sur de California han desarrollado una nueva mano robótica MOTIF (Observación Multimodal basada en Sensores Térmicos, de Inercia y de Fuerza), diseñada para mejorar la capacidad de manipulación de objetos en robots humanoides. Este innovador logro se ha publicado en un artículo en el servidor de preimpresión arXiv.
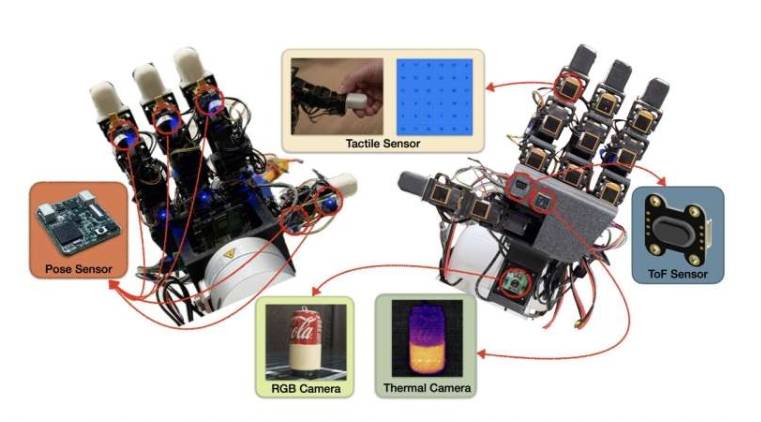
La mano robótica MOTIF integra múltiples dispositivos de sensado, incluyendo sensores táctiles, sensores de profundidad, termógrafos, unidades de medición inercial (IMU) y sensores visuales. Los miembros del equipo, como Daniel Seita, indican que esta investigación surge de la necesidad de que la manipulación robótica supere la percepción tradicional visual y táctil; las manos robóticas multifinger actuales suelen carecer de capacidades de percepción integrada necesarias para tareas complejas.
El diseño de la mano MOTIF se inspira en la mano humana, con el objetivo de desarrollar una mano multifuncional y multimodal que pueda manejar objetos de manera segura y precisa. Al utilizar entradas de sensores más completas, esta mano puede realizar interacciones más refinadas con objetos en diversos entornos, como hogares y fábricas. El equipo previamente descubrió, al usar manos de destreza comerciales, que muchos diseños de hardware existentes se centran en estructuras de transmisión mecánica y no satisfacen las necesidades de sensado de la investigación, lo que los impulsó a buscar plataformas de hardware expandibles DIY.
Como una mano robótica avanzada, MOTIF integra múltiples sensores en una plataforma de destreza, extendiendo el diseño ampliamente utilizado de la mano LEAP y mejorando sus capacidades de sensado. Sus ventajas principales incluyen una percepción ambiental integral, la capacidad de manejar objetos a alta temperatura de manera segura, y la habilidad para distinguir objetos con apariencias similares pero propiedades físicas diferentes.
Para evaluar el potencial de la mano MOTIF, los investigadores realizaron dos experimentos en entornos de laboratorio. El primer experimento evaluó la capacidad de la mano para capturar objetos considerando su temperatura, evitando áreas sobrecalentadas; el segundo experimentó clasificando objetos de forma idéntica pero pesos diferentes mediante un movimiento de “golpeo” con la punta del dedo.
Los resultados muestran que la combinación de sensado térmico con reconstrucción 3D puede guiar capturas seguras de manera efectiva, mientras que el sensado inercial permite clasificaciones precisas de masa de objetos. En pruebas preliminares, la mano MOTIF se desempeñó excelentemente, capturando de manera segura diversos objetos y prediciendo con precisión su masa.
En el futuro, la mano MOTIF se mejorará aún más y se probará en experimentos más amplios para verificar su potencial en aplicaciones específicas. Seita y sus estudiantes creen que esta tecnología es especialmente prometedora para tareas manuales en entornos domésticos, cocinas profesionales e industriales, como cocinar platos calientes, soldar o apretar tornillos, donde podría superar a otros sistemas existentes.
El equipo también planea mejorar aún más las funciones de la mano MOTIF integrando más sensores de punta de dedo de alta resolución (como Digit 360) para proporcionar retroalimentación táctil más fina. Al mismo tiempo, se comprometen a refinar algoritmos de sensado multimodal y explorar más aplicaciones en entornos reales complejos.
Además, el profesor Zhou revela que el equipo presentó este trabajo la semana pasada en la conferencia ISER 2025 en Santa Fe, intercambiando ideas con muchos investigadores excelentes, esperando que inspire a la comunidad académica a pensar en más direcciones de investigación en modos de sensado.