Los investigadores de la Universidad Jiao Tong de Shanghai han logrado un gran avance en la navegación autónoma de drones, proponiendo un nuevo método inspirado en las capacidades de vuelo de los insectos, con resultados publicados en la revista Nature Machine Intelligence.
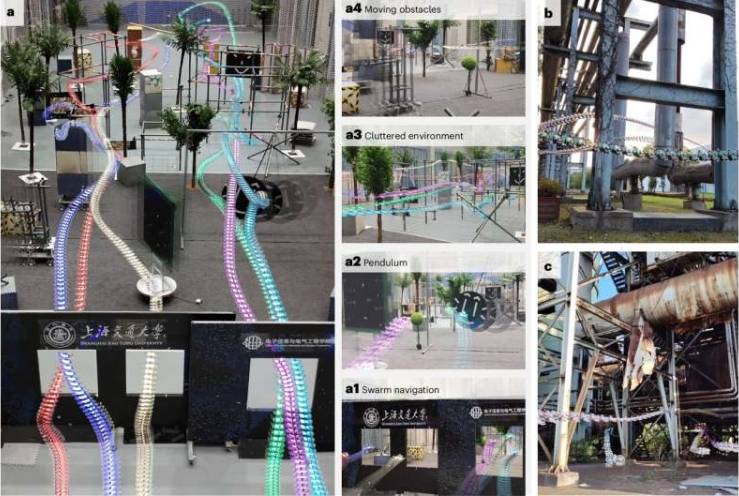
Actualmente, aunque los drones se utilizan ampliamente, la mayoría requiere operación manual y es propenso a colisiones en entornos desordenados, congestionados o desconocidos, dependiendo de componentes costosos y voluminosos. El nuevo método propuesto por el equipo de Shanghai Jiao Tong permite que múltiples drones naveguen de manera autónoma en entornos complejos a alta velocidad.
El estudio se inspira en las capacidades de vuelo de insectos diminutos como las moscas, con el objetivo de replicar su alto nivel de control de vuelo, que requiere una integración estrecha de percepción, planificación y control, operando con cómputo a bordo limitado. Los métodos computacionales tradicionales para controlar múltiples drones dividen las tareas de navegación autónoma en módulos independientes, lo que fácilmente lleva a acumulación de errores y retrasos en la respuesta, aumentando el riesgo de colisiones.
Para esto, el equipo de investigación exploró redes neuronales artificiales (ANN) livianas, reemplazando los procesos clásicos con una estrategia compacta de extremo a extremo. El nuevo sistema depende de una ANN liviana recién desarrollada que genera comandos de control para cuadricópteros basados en mapas de profundidad de ultra baja resolución de 12x16 píxeles; aunque la resolución de entrada es baja, es suficiente para que la red entienda el entorno y planifique acciones. La red se entrena en un simulador personalizado, con un proceso de entrenamiento eficiente que soporta modos de entrenamiento de agente único y multiagente.
La ventaja clave del nuevo método radica en su dependencia de una red neuronal profunda altamente compacta y liviana, con solo tres capas convolucionales. Los investigadores probaron la red en una placa de cómputo embebida de 21 dólares, encontrando que opera de manera fluida y eficiente en energía. El entrenamiento solo toma 2 horas, y el sistema soporta navegación multi-robot sin planificación centralizada o comunicación explícita, permitiendo un despliegue escalable.
El equipo descubrió que incrustar directamente el modelo físico del cuadricóptero en el proceso de entrenamiento mejora significativamente la eficiencia del entrenamiento y el rendimiento real. Esta investigación desafía la suposición de “más datos es mejor”, indicando que la alineación estructural y los priors físicos incrustados pueden ser más importantes que la pura cantidad de datos.
En el futuro, este método se puede aplicar a más tipos de aeronaves, expandiendo las capacidades de drones ultraligeros, como autorretratos automáticos, participación en carreras, y también en transmisiones de eventos deportivos, operaciones de búsqueda y rescate, e inspecciones de almacenes. Actualmente, el equipo está explorando el uso de flujo óptico en lugar de mapas de profundidad para vuelo completamente autónomo, y persiguiendo la interpretabilidad de sistemas de aprendizaje de extremo a extremo, elucidando aún más las representaciones internas de la red para proporcionar insights sobre el comportamiento de los insectos.