

En la actualidad, los robots pueden realizar tareas específicas de manera eficiente, como colocar latas en una cinta transportadora en una fábrica. Sin embargo, en entornos menos estructurados y frente a una variedad de tareas, incluso acciones aparentemente simples como desenroscar una bombilla o girar el pomo de una puerta resultan extremadamente difíciles para los robots.
Este problema está estrechamente relacionado con el mecanismo de "muñeca" que utilizan los robots. Normalmente, los robots diseñados para manipular objetos están equipados con una pinza y una muñeca con tres grados de libertad (es decir, tres formas independientes de movimiento: "giro" o "roll" (rotación hacia adelante/atrás), "inclinación" o "pitch" (izquierda/derecha) y "guiñada" o "yaw" (vertical). Pero la estructura mecánica tradicional de la muñeca es compleja y voluminosa, y está situada lejos del objeto a agarrar. Para completar una tarea, el robot necesita mover todo el brazo, lo que resulta en movimientos torpes e ineficientes de la muñeca, además de ocupar mucho espacio.
Sin embargo, investigadores de la Universidad de Yale han logrado un avance innovador. Sus resultados de investigación, publicados en la revista Nature Machine Intelligence, han desarrollado un método más simple para ayudar a los robots a manejar movimientos complejos.
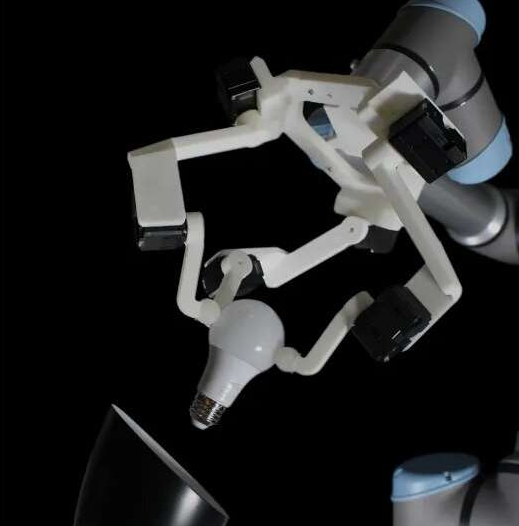
La pinza robótica desarrollada por el laboratorio del profesor Aaron Dollar en Yale ha sido bautizada como "Sphinx". Emplea un mecanismo esférico que le permite agarrar una variedad de objetos y rotarlos en tres ejes, combinando muchas de las funciones de una muñeca y una pinza tradicionales. Vatsal Patel, estudiante de doctorado en el laboratorio de Dollar y primer autor del artículo, explica que la pinza "Sphinx" no es compleja, no tiene sensores y puede funcionar sin necesidad de cámaras u otros dispositivos. Gracias a su estructura esférica, siempre puede lograr el giro, la inclinación y la guiñada del objeto.
La pinza "Sphinx" tiene ventajas significativas. Es más eficiente, ocupa menos espacio, y su muñeca puede realizar rotaciones más cerca del objeto, sin necesidad de mover todo el brazo, lo que permite trabajar más rápido y con mayor eficiencia. Este diseño también facilita que los robots ejecuten tareas en espacios confinados, como apretar una bombilla dentro de un armario.
En un nivel más amplio, la pinza "Sphinx" acerca al campo de la robótica a un objetivo cada vez más común: diseñar robots que puedan funcionar bien en hogares, lugares de desastres y otros entornos no estructurados. Patel señala que en estos entornos, los robots no pueden conocer la posición exacta de los objetos y necesitan adaptarse al entorno y a los objetos, lo cual es precisamente la dirección del desarrollo de la tecnología robótica, y el equipo de Yale está trabajando arduamente para abordar este desafío. El logro del desarrollo de la pinza "Sphinx" sin duda inyecta nueva vitalidad al desarrollo de la tecnología robótica en el campo de la fabricación de equipos de alta gama, y se espera que impulse la expansión de los escenarios de aplicación de los robots hacia entornos no estructurados más amplios.