

Un equipo internacional de científicos, inspirándose en cómo animales como murciélagos, ballenas e insectos utilizan señales acústicas para comunicarse y navegar, ha logrado simular enjambres de microrrobots. Estos robots coordinan sus acciones mediante ondas sonoras, formando grandes colectivos que exhiben comportamientos similares a la inteligencia. La investigación relacionada se ha publicado en la revista Physical Review X.
Igor Aronson, profesor titular de la Cátedra Huck de la Universidad Estatal de Pensilvania y líder del equipo, afirmó que estos enjambres de robots podrían en el futuro realizar tareas complejas, como explorar zonas de desastre, limpiar contaminación e incluso llevar a cabo trabajos médicos dentro del cuerpo humano. Poniendo como ejemplo enjambres de abejas o mosquitos, explicó que estos colectivos robóticos pueden, al igual que ellos, mantener la cohesión a través del sonido, actuando numerosos individuos como una sola unidad.
Estos enjambres de microrrobots poseen ventajas únicas. Al poder generar sonido de forma autoorganizada, pueden navegar en espacios reducidos y, tras deformarse, son capaces de reorganizarse por sí mismos. Su inteligencia colectiva podría utilizarse en el futuro para limpiar contaminantes en entornos polucionados. Dentro del cuerpo humano, podrían administrar fármacos con precisión en áreas problemáticas; su capacidad de percepción colectiva podría detectar cambios en el entorno circundante, y su capacidad de «autorreparación» les permitiría seguir funcionando como un todo incluso después de desintegrarse, mostrando un gran potencial en detección de amenazas y aplicaciones de sensores.
Aronson señaló que esta investigación es un paso importante hacia la creación de microrrobots más inteligentes, resilientes, prácticos y menos complejos. Sus hallazgos son cruciales para diseñar la próxima generación de microrrobots capaces de realizar tareas complejas en entornos desafiantes y de responder a estímulos externos.
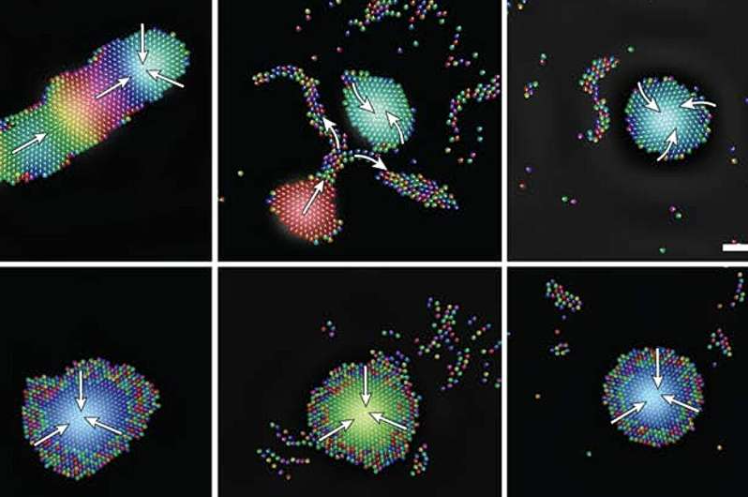
Para llevar a cabo la investigación, el equipo desarrolló modelos computacionales para rastrear el movimiento de los microrrobots, cada uno equipado con un emisor y un detector de ondas sonoras. El estudio descubrió que la comunicación acústica permite a los robots colaborar sin problemas y adaptar su forma y comportamiento al entorno, similar a un banco de peces o una bandada de pájaros.
Aronson explicó que los robots del artículo son agentes computacionales en un modelo teórico, pero la inteligencia colectiva observada en la simulación probablemente aparecería en estudios experimentales con el mismo diseño. Sorprendentemente, estos robots, con circuitos electrónicos simples equipados solo con un motor, un micrófono en miniatura, un altavoz y un oscilador, mostraron inteligencia colectiva. Son capaces de sincronizar sus osciladores con la frecuencia del campo sonoro del enjambre y migrar hacia la dirección de la señal más fuerte.
Este descubrimiento es un nuevo hito en el campo emergente de la «materia activa». Este campo estudia el comportamiento colectivo de medios biológicos y sintéticos microscópicos autopropulsados. Esta investigación demuestra por primera vez que las ondas sonoras pueden usarse como medio para controlar microrrobots. Anteriormente, las partículas de materia activa se controlaban principalmente mediante señales químicas. Las ondas sonoras son más efectivas que las señales químicas para la comunicación: se propagan más rápido, a mayor distancia, con menor pérdida de energía, y su diseño es más simple, permitiendo a los robots «oírse» y «encontrarse» entre sí de manera efectiva, logrando una autoorganización colectiva.
Se informa que los otros autores del artículo incluyen a Alexander Ziepke, Ivan Maryshev y Erwin Frey de la Universidad de Múnich.