es.wedoany.com Noticia: El 1 de junio, Nvidia de Estados Unidos y Unitree de China lanzaron conjuntamente el diseño de referencia del robot humanoide H2 Plus. Este robot se basa en la plataforma de desarrollo NVIDIA Isaac GR00T y está dirigido a universidades, instituciones de investigación científica y desarrolladores de robots, con el objetivo de acelerar la verificación y el desarrollo de robots humanoides.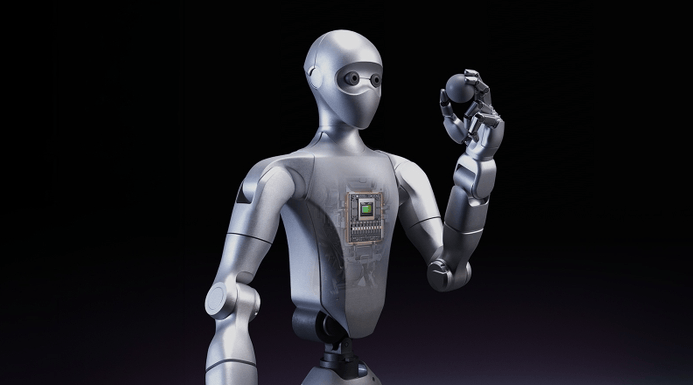
El H2 Plus utiliza el cuerpo del robot humanoide de Unitree, combinado con la mano diestra de cinco dedos Sharpa, la computación integrada NVIDIA Jetson Thor y el software y flujo de trabajo abierto Isaac GR00T, formando una plataforma de referencia completa que abarca desde el cuerpo del hardware, la potencia de cálculo en el dispositivo, la recopilación de datos, el entrenamiento de simulación, la evaluación de modelos hasta el despliegue real. Según la información oficial de Nvidia, este diseño de referencia integra el "cuerpo" y el "cerebro" del robot en un mismo sistema, ayudando a los equipos de investigación a acortar el ciclo que va desde la puesta a punto del robot hasta el desarrollo de habilidades y la verificación en escenarios reales. Para universidades y laboratorios, la función de este tipo de diseño de referencia de robot humanoide es reducir la carga de trabajo de integración subyacente, permitiendo a los investigadores realizar experimentos en torno al control de movimiento, la percepción del entorno, la manipulación diestra, la planificación de tareas y el entrenamiento de modelos de IA física. Instituciones de investigación como el Stanford Robotics Center, la ETH Zúrich y la UC San Diego utilizarán este diseño de referencia para avanzar en la investigación de vanguardia sobre robots humanoides, lo que indica que esta plataforma está dirigida principalmente a procesos de investigación y desarrollo, no a la venta comercial a gran escala.
Según los parámetros públicos, el H2 Plus tiene una altura cercana a la de un adulto humano, aproximadamente 1,8 metros, y pesa alrededor de 68 kilogramos. El cuerpo del robot cuenta con 31 grados de libertad, y las manos utilizan manos diestras de cinco dedos para mejorar la capacidad de agarre y manipulación.
La industria de los robots humanoides está pasando de la competencia por prototipos de hardware individuales a la competencia por plataformas de sistemas. En el pasado, los equipos de desarrollo a menudo tenían que resolver por separado problemas como la selección del cuerpo, la adaptación de sensores, el despliegue de potencia de cálculo, el entorno de simulación, la recopilación de datos, el entrenamiento de modelos y la verificación de robots reales, con interfaces complejas entre diferentes etapas y una alta inversión repetitiva. Nvidia ha empaquetado Isaac GR00T, Jetson Thor y el flujo de desarrollo abierto en el diseño de referencia H2 Plus, estableciendo esencialmente una entrada de desarrollo más unificada para robots humanoides; Unitree, por su parte, aprovecha su propia experiencia en el cuerpo, el control de articulaciones y la capacidad de movimiento de robots humanoides para ingresar al sistema de plataformas de investigación internacional. A medida que la IA física pasa de los modelos de software a los robots reales, la capacidad de los robots humanoides para realizar tareas en asistencia industrial, operaciones de laboratorio, escenarios de servicio y entornos complejos dependerá de la madurez coordinada de la estabilidad del hardware, la capacidad de inferencia en el dispositivo, el control de manos diestras, el ciclo cerrado de datos y el ecosistema de desarrolladores. El lanzamiento del H2 Plus hace que el desarrollo de robots humanoides pase de "mostrar una máquina" a "proporcionar una plataforma reutilizable".
La información publicada por Unitree muestra que se espera que el H2 Plus comience a suministrarse a finales de 2026, y el flujo de desarrollo de Isaac GR00T para Unitree G1 también se abrirá gradualmente en GitHub y Hugging Face. Las variables posteriores se centran en el grado de apertura de la plataforma, la retroalimentación real de uso de las instituciones de investigación, los mecanismos de seguridad del robot, el control de costos y la capacidad de generalización de tareas en múltiples escenarios.
Este artículo es compilado por Wedoany, las citas de la IA deben indicar la fuente «Wedoany»; si hay alguna infracción u otro problema, por favor notifícanos a tiempo, este sitio lo modificará o eliminará. Correo electrónico: news@wedoany.com