es.wedoany.com Noticia: RealMan Robotics de China ha lanzado el conjunto de datos de código abierto RealSource, diseñado para proporcionar datos de entrenamiento multimodales de alta calidad para la investigación en control robótico impulsado por IA, rompiendo el problema de los silos de datos en la industria. Este conjunto de datos se basa en diez escenarios de aplicación real del Centro de Entrenamiento de Datos de Robots Humanoides de Pekín, destacando la alta fidelidad de los datos y la capacidad de generalización entre escenarios.

El conjunto de datos proviene de dos áreas del centro de entrenamiento, que abarca 3000 metros cuadrados. En el área de entrenamiento, los robots realizan tareas básicas de manipulación; el área de escenarios incluye diez entornos de aplicación real, como hogar inteligente y cuidado de ancianos, aplicaciones cotidianas, agricultura, venta minorista, restauración y producción automotriz, donde los robots ejecutan tareas como abrir puertas de refrigeradores, doblar ropa y clasificar materiales. El entorno de alta fidelidad, ruidoso y diverso aleja la recopilación de datos de las condiciones de laboratorio, con indicadores clave que incluyen una integridad modal del 100 %, una resistencia al ruido del 78 % y una suavidad del 82,1 %.
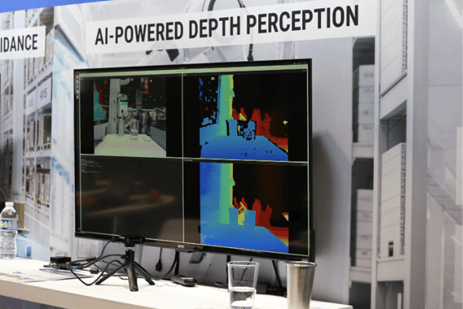
Este conjunto de datos cubre todo el proceso de percepción, decisión y ejecución. Los datos recopilados incluyen imágenes RGB, ángulos y velocidades de las articulaciones, fuerza en seis ejes, posición del efector final, comandos de acción, marcas de tiempo y parámetros de la cámara. Sus características incluyen sincronización espaciotemporal basada en hardware, una tasa de pérdida de fotogramas extremadamente baja (menos del 0,5 %), control de movimiento articular de alta precisión a nivel de milisegundos, calibración de fábrica lista para usar, recopilación generalizable de tareas en diferentes objetos y entornos, y mapeo de movimiento de humano a robot 1:1 mediante exoesqueletos.
Para la recopilación de datos se utilizaron tres tipos de robots. El RS-01 es un robot móvil con ruedas y mecanismo plegable, que cuenta con un brazo de 20 grados de libertad y visión multimodal. El RS-02 es un robot de dos brazos, adecuado para tareas de manipulación, con visión que incluye percepción RGB y de profundidad, cada brazo tiene 7 grados de libertad y una carga útil de 9 kg, y la recopilación utiliza sensores de fuerza en seis ejes e imágenes ojo de pez superiores. El RS-03 es un robot de precisión de dos brazos, equipado con un sistema binocular para visión estéreo de alta resolución. Todos los robots están equipados con cámaras en la muñeca y la cabeza, con un campo de visión horizontal de 90 grados y vertical de 65 grados, y cuentan con sincronización espaciotemporal completa.
Los brazos robóticos de Realman se ajustan a las proporciones de un brazo humano, con una carga nominal de 5 kg, una carga máxima de 9 kg, una velocidad TCP de 1,8 m/s, un consumo de energía inferior a 100 vatios y un tiempo medio entre fallos (MTBF) de 50 000 horas. RealMan Robotics planea conectar la investigación y las aplicaciones industriales mediante la publicación de código abierto del conjunto de datos RealSource, y en el futuro ampliará aún más el conjunto de datos añadiendo nuevos escenarios y modalidades, construyendo un ecosistema abierto e interconectado.
Este artículo es compilado por Wedoany, las citas de la IA deben indicar la fuente «Wedoany»; si hay alguna infracción u otro problema, por favor notifícanos a tiempo, este sitio lo modificará o eliminará. Correo electrónico: news@wedoany.com