

Los investigadores han logrado un avance significativo en el campo de los robots blandos. Inspirándose en los músculos de agarre de los moluscos, han desarrollado con éxito un actuador de bajo voltaje similar a un músculo, que ayuda a los robots blandos del tamaño de un insecto a lograr la locomoción autónoma, como gatear, nadar y saltar, en entornos reales. Esto resuelve un problema de larga data: la dificultad de equilibrar potencia y precisión en el movimiento autónomo de los microrrobots.
Los músculos, como tejidos blandos, generan movimiento mediante contracción y relajación. Los músculos de los insectos, aunque pequeños, son notablemente fuertes. Los actuadores son dispositivos que convierten energía mecánica en movimiento. En robótica, crear actuadores micrométricos potentes, flexibles, precisos y elásticos como los músculos biológicos es un gran desafío. Además, los motores rígidos en los sistemas robóticos actuales están limitados por su fragilidad y dificultad para miniaturizar.
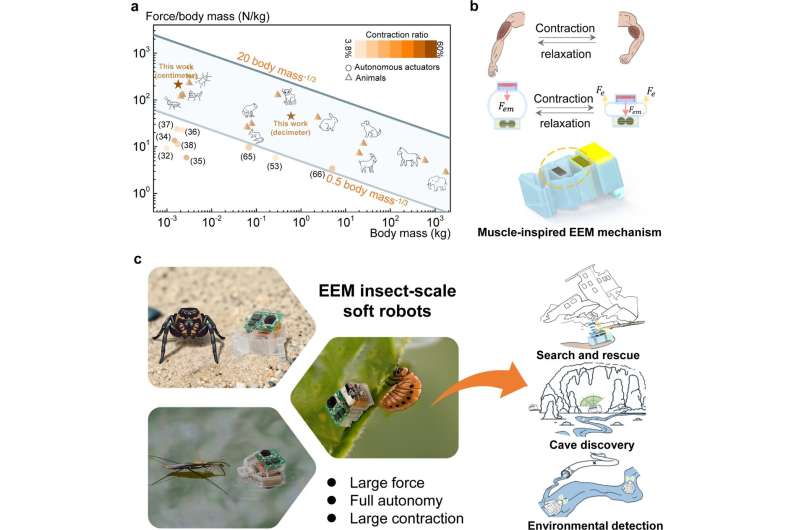
En un estudio publicado en la revista Nature, el equipo de investigación describe su método para superar estos desafíos. Desarrollaron un mecanismo electromagnético inspirado en los músculos, combinando un polímero blando (material elástico) con bobinas eléctricas que enrollan pequeños imanes, imitando el sistema muscular de agarre de los moluscos. Este sistema puede mantener posiciones biestables sin un suministro de energía continuo, similar a cómo un molusco mantiene su caparazón cerrado con un gasto energético mínimo.
La durabilidad es una ventaja notable de esta nueva tecnología. El actuador, fabricado con materiales flexibles, puede soportar millones de ciclos de movimiento e incluso caídas de hasta 30 metros.
Para probar el rendimiento del actuador, el equipo de investigación construyó varios robots blandos del tamaño de un insecto. Estos robots completaron con éxito pruebas de locomoción autónoma, como gatear, nadar y saltar, en diversos entornos y superficies como rocas rugosas, tierra y vidrio. Algunos robots realizaron entrenamiento de obstáculos mientras ejecutaban operaciones de detección, y los robots nadadores fueron probados tanto en laboratorio como en un río. Las pruebas exitosas destacan la versatilidad y robustez del actuador, abriendo posibilidades para numerosas aplicaciones potenciales.
Los investigadores afirman que este mecanismo electromagnético inspirado en músculos, a través de cambios en la estructura elástica, amplía la autonomía y las capacidades funcionales de los pequeños robots blandos, teniendo potencial aplicación en rescate y detección de señales críticas. Estos microrrobots podrían participar en operaciones de búsqueda y rescate, inspeccionar áreas peligrosas o de difícil acceso para los humanos, y también tienen potencial para la exploración de cuevas y el desarrollo de herramientas médicas mínimamente invasivas.