Una nueva investigación publicada en la revista npj Robotics ha resuelto con éxito el problema del vuelo de vehículos aéreos cuádrupteros pequeños en conductos de viento estrechos, abriendo nuevas vías de aplicación en inspección industrial y seguridad pública. Esta investigación fue liderada por un equipo de investigadores del Instituto Nacional de Investigación en Informática y Automatización de Francia (Inria), el Centro Nacional de Investigación Científica de Francia (CNRS), la Universidad de Lorena y la Universidad de Aix-Marseille.
En edificios modernos y redes de tuberías subterráneas, los conductos de ventilación están ampliamente distribuidos, pero su inspección y mantenimiento son extremadamente difíciles. Los conductos de ventilación son estrechos en tamaño y no pueden soportar el peso humano, lo que dificulta las intervenciones necesarias para garantizar la calidad del aire, el funcionamiento normal de los sistemas de calefacción y aire acondicionado.
Los drones cuádrupteros pequeños, con su capacidad para volar horizontal y verticalmente, se convierten en una solución potencial para explorar los conductos de viento. Sin embargo, durante el vuelo dentro de los conductos, generan flujos de aire circulatorios que hacen que el dron sea inestable, causando turbulencias severas en entornos con espacio de tolerancia limitado, lo que restringe su aplicación práctica.
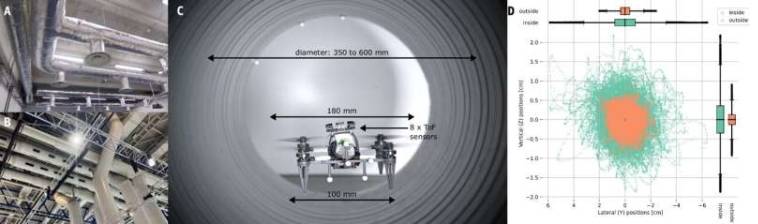
Para resolver estos problemas, el equipo de investigación primero investigó en profundidad el impacto de la posición del dron en los conductos en la circulación de aire. Utilizando brazos mecánicos y sensores de fuerza/torque, midieron con precisión las fuerzas en cientos de posiciones, dibujando el primer "mapa de fuerzas". Este mapa presenta claramente patrones aerodinámicos complejos, permitiendo identificar con precisión las partes "inseguras" en conductos circulares, es decir, áreas donde la recirculación de aire empuja el dron hacia las paredes, y posiciones más seguras donde las fuerzas de recirculación se cancelan mutuamente.
Después de determinar las posiciones seguras, la clave era cómo hacer que el dron se posicione con precisión y se mantenga en los puntos sugeridos en entornos oscuros sin indicaciones visuales. El equipo de investigación innovó combinando un pequeño láser con tecnología de inteligencia artificial, utilizando una red neuronal entrenada con datos de captura de movimiento para permitir que el dron pequeño perciba con precisión su posición y se mantenga siempre en la posición con las turbulencias mínimas, logrando un vuelo más seguro y estable.
Los resultados de esta investigación traen un nuevo amanecer para la aplicación de drones en inspección industrial y seguridad pública. En el futuro, el equipo de investigación planea desarrollar un prototipo más orientado a la aplicación, equipándolo con cámaras, termales o sensores de gas y otras cargas útiles prácticas, para expandir aún más su rango de aplicación práctica en campos relevantes.