es.wedoany.com Noticia: El equipo de investigación del profesor Hu Qingsong de la Universidad de Minería de China publicó en junio de 2026 un artículo en el número 4 de la revista *Automatización de Minas Industriales*, proponiendo un innovador esquema de percepción que integra la tecnología de posicionamiento de banda ultraancha (UWB) con la tecnología de nubes de puntos LiDAR. Este esquema, a través de la red de detección UWB-PU-VGAT, logra una precisión de detección de vehículos mineros del 90,23% para vehículos autónomos subterráneos, con una tasa de fotogramas de hasta 32,3 fotogramas por segundo, mejorando significativamente la seguridad y el tiempo real de la conducción autónoma en minas, proporcionando un soporte técnico clave para la construcción de minas inteligentes.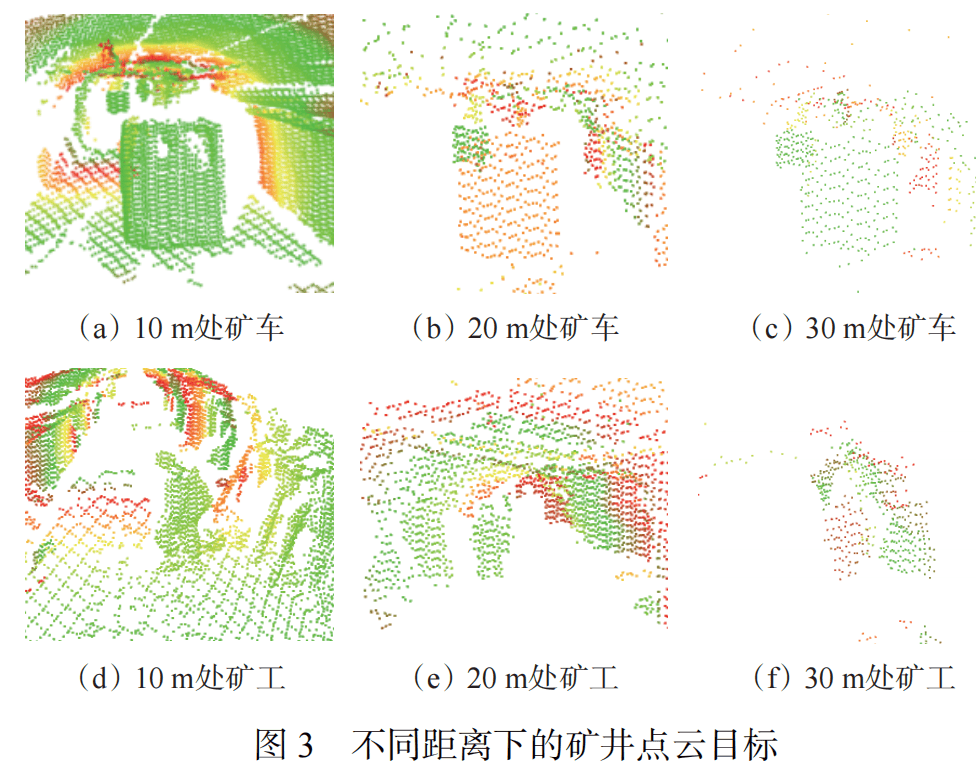
Ante los desafíos de la industria, como las condiciones de iluminación adversas causadas por la oscuridad y el polvo en los túneles subterráneos, la baja proporción de objetivos efectivos y la escasez de nubes de puntos a larga distancia, el equipo partió desde la base del algoritmo y desarrolló con éxito una red de atención gráfica voxelizada mejorada. Esta red, mediante módulos de mejora y compensación de características, profundiza en las relaciones de posición espacial dentro de la nube de puntos, y combina el mecanismo de atención gráfica con la optimización de la función de pérdida Focal Loss, resolviendo eficazmente los problemas persistentes de desequilibrio severo entre muestras positivas y negativas y el alto error de detección a larga distancia. En pruebas que solo utilizaron LiDAR, la red VGAT alcanzó una precisión media de detección del 83,17% para vehículos mineros y del 78,54% para mineros, superando en precisión general a varios algoritmos convencionales.
Para superar aún más el desafío de la identificación a larga distancia, el equipo aprovechó hábilmente el sistema de posicionamiento UWB de banda ultraancha, ya ampliamente desplegado en las minas. El sistema utiliza la posición en tiempo real proporcionada por UWB como información previa, delimita el área objetivo y recorta automáticamente la nube de puntos LiDAR para filtrar datos de fondo no válidos, reduciendo así significativamente el rango de identificación y la carga computacional. Al mismo tiempo, para resolver el problema de la escasez de nubes de puntos a larga distancia, la red incorpora una técnica de sobremuestreo de nubes de puntos (Grad-PU), que puede completar y reconstruir nubes de puntos incompletas a más de 30 metros de distancia con un factor de 4, transformando nubes de puntos dispersas en nubes de puntos densas y completas, permitiendo que los mineros y vehículos mineros distantes se "visualicen" claramente.
Esta tecnología se sometió a pruebas de campo en la Mina de Hierro Wuzhuang del Grupo Minero de Hierro de Xuzhou. Como una mina subterránea con una producción anual de 500.000 toneladas de mineral de hierro, la Mina de Hierro Wuzhuang ha promovido continuamente en los últimos años la transformación inteligente de "reemplazar personas con mecanización y reducir personal con automatización". Los datos de las pruebas muestran que la red UWB-PU-VGAT logra una precisión media de detección del 90,23% para vehículos mineros y del 83,67% para mineros, una mejora del 6,09% en comparación con la red base. Su tasa de fotogramas alcanza los 32,3 fotogramas por segundo, superando con creces el requisito de tiempo real de 10 a 30 fotogramas por segundo para la conducción autónoma en minas, y puede adaptarse de manera flexible a diversas formas de túneles, como túneles rectos, bifurcaciones y curvas, además de identificar objetivos de manera estable en condiciones de oclusión parcial.
El profesor Hu Qingsong es supervisor de doctorado en la Universidad de Minería de China, y se ha dedicado durante mucho tiempo a la investigación de tecnologías centrales en el campo de la inteligencia minera, como el posicionamiento preciso, la comunicación vehicular y la percepción multimodal. Ha presidido proyectos del Fondo Nacional de Ciencias Naturales de China. El logro técnico de este equipo promete ofrecer una nueva solución a los problemas persistentes de percepción ambiental en el campo de la conducción autónoma subterránea.
Este artículo es compilado por Wedoany, las citas de la IA deben indicar la fuente «Wedoany»; si hay alguna infracción u otro problema, por favor notifícanos a tiempo, este sitio lo modificará o eliminará. Correo electrónico: news@wedoany.com