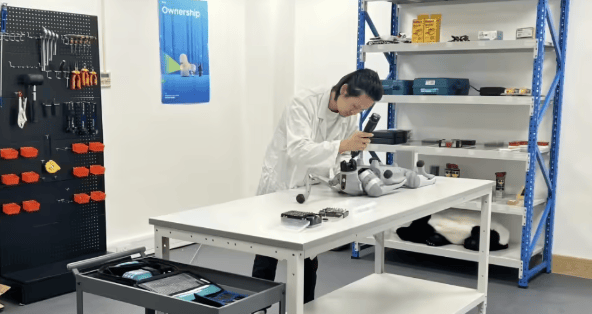
es.wedoany.com Noticia: Los robots humanoides industriales chinos están pasando de "poder entrar en la fábrica" a "poder integrarse en procesos específicos". El 25 de junio, el robot humanoide industrial con ruedas Cruzr Y1, de la empresa china de robótica UBTECH, hizo su debut público mundial en la Conferencia de Tecnología OPPO de China y la Exposición de Tecnología de Cadena de Suministro, donde demostró el proceso completo de desapilado y apilado de cajas. Este producto está diseñado para escenarios de fabricación industrial, logística de almacenes, transporte en la cadena de suministro y carga y descarga flexible, abordando problemas clave como la escasa adaptabilidad de los equipos de automatización tradicionales a los cambios de posición de los materiales, los largos ciclos de ajuste para cambios de producción y la capacidad limitada para procesos individuales.
El Cruzr Y1 adopta una combinación de un chasis móvil con ruedas y una estructura superior humanoide, orientado a tareas como transporte continuo, desapilado, apilado, carga y descarga, y clasificación en entornos de fábrica y almacén. En comparación con los robots humanoides bípedos, la estructura con ruedas es más adecuada para operaciones prolongadas en superficies industriales planas, lo que reduce la complejidad del control de movimiento y mejora la estabilidad operativa y la eficiencia energética. Frente a los brazos robóticos fijos tradicionales, el robot humanoide industrial con ruedas ofrece un mayor radio de operación, puede moverse entre múltiples estaciones de trabajo y es ideal para la transición de tareas entre líneas de producción, áreas de almacenamiento y células de fabricación flexible.
La demostración en vivo del desapilado y apilado de cajas representa operaciones de alta frecuencia, repetitivas y con gran exigencia física en los sectores de fabricación y logística. Los equipos tradicionales de desapilado y apilado automatizados suelen depender de estaciones fijas, palés estándar, posturas estables de los materiales y trayectorias predefinidas. Si la posición de las cajas se desvía ligeramente, cambia el estado de apilado o se modifican las especificaciones del producto, a menudo se requiere intervención manual o un nuevo ajuste. El Cruzr Y1 integra percepción visual, control de movimiento, operación de brazos robóticos y chasis móvil, con el objetivo de completar tareas de transporte flexible en entornos de trabajo más complejos e irregulares.
UBTECH define al Cruzr Y1 como un robot humanoide industrial con ruedas para entornos industriales, lo que indica que su enfoque no está en la exhibición, el acompañamiento o la atención al cliente, sino en ingresar a las operaciones de transporte y manipulación más cercanas a la producción. Los clientes industriales se centran realmente en la eficiencia, la estabilidad, el ciclo de implementación, los costos de mantenimiento y la replicabilidad. Si un robot solo puede completar una demostración única, difícilmente generará valor comercial; solo manteniendo un funcionamiento estable en escenarios con múltiples lotes, múltiples materiales y múltiples estaciones de trabajo podrá ingresar al sistema de evaluación de compras de integradores de automatización y clientes de fábricas.
El Cruzr Y1 está equipado con los chips de cómputo nacionales D-Robotics S100P y S600, y se sustenta en la arquitectura de hardware propia de UBTECH y el sistema de software ROSA. El robot debe realizar reconocimiento visual, localización de materiales, planificación de rutas, control de agarre, organización de tareas y manejo de excepciones en el sitio, lo que exige un alto rendimiento en cómputo local, control en tiempo real y estabilidad del sistema de software. El uso de chips de cómputo nacionales y un sistema de software propio permite a UBTECH tener una mayor autonomía en el control de la cadena de suministro, la iteración de productos y la adaptación a escenarios.
El algoritmo integrado de visión-lenguaje-acción (VLA) es un soporte técnico clave para el Cruzr Y1. Los robots industriales tradicionalmente dependían más de la enseñanza y programas fijos, adecuados para tareas repetitivas en entornos estables. El algoritmo VLA busca conectar la percepción visual, la comprensión de tareas lingüísticas y la ejecución de acciones, permitiendo que el robot comprenda el estado del sitio en función de la tarea objetivo y luego planifique los movimientos de agarre, desplazamiento y colocación. Para tareas flexibles como desapilado, apilado, carga y descarga, y clasificación de cajas, el robot necesita identificar la posición de los objetos, evaluar los cambios de postura, planificar los puntos de agarre y corregir desviaciones durante la ejecución.
Este lanzamiento también coincide con la expansión de canales de UBTECH. UBTECH ha publicado una política de reclutamiento de agentes exclusivos regionales, ofreciendo soporte técnico, posventa y de mercado a integradores de automatización y socios de canal de la cadena de suministro. Para que los robots industriales ingresen a fábricas reales, generalmente se requiere que los integradores locales realicen estudios del sitio, modificaciones de estaciones de trabajo, integración de sistemas, puesta en marcha y mantenimiento posventa. El sistema de agentes regionales e integradores puede ayudar a que los productos ingresen más rápidamente a diferentes escenarios industriales y también retroalimentar las necesidades de los clientes al cuerpo del robot, los algoritmos y las aplicaciones.
El mercado de robots industriales en China está pasando de la automatización con brazos robóticos estándar a la robótica corpórea y la operación flexible. Industrias como la fabricación electrónica, autopartes, cadena de suministro 3C, logística de almacenes, alimentos y bebidas, y envasado farmacéutico tienen una gran demanda de transporte, carga y descarga, y clasificación. En el pasado, estos escenarios dependían de mano de obra o de equipos de automatización personalizados. Si los robots humanoides industriales con ruedas pueden cumplir con los requisitos de las fábricas en términos de costo, estabilidad y eficiencia de implementación, ofrecerán una nueva solución para la fabricación flexible.
UBTECH ya ha avanzado en la implementación a escala en el campo de los robots humanoides industriales, y el lanzamiento del Cruzr Y1 enriquece aún más su oferta de productos industriales. En comparación con las plataformas bípedas, el robot humanoide industrial con ruedas enfatiza más la practicidad y la eficiencia en el escenario; frente a los brazos robóticos fijos, destaca por su capacidad de movimiento y adaptación a múltiples tareas. La capacidad del Cruzr Y1 para generar pedidos dependerá de los resultados de las pruebas con clientes, la construcción de canales de integradores, la estabilidad operativa en el sitio, los costos de mantenimiento y su capacidad de adaptación a diferentes materiales y estaciones de trabajo.
Este artículo es compilado por Wedoany, las citas de la IA deben indicar la fuente «Wedoany»; si hay alguna infracción u otro problema, por favor notifícanos a tiempo, este sitio lo modificará o eliminará. Correo electrónico: news@wedoany.com