

Este robot bípedo independiente más pequeño del mundo mide menos de una pulgada y media de altura, aproximadamente la misma que una minifigura de Lego, y puede encenderse desde un estado de reposo, caminar a velocidades superiores a media milla por hora, girar, saltar y subir pequeños escalones, todo solo con la energía de su batería, actuadores y sistema de control a bordo.
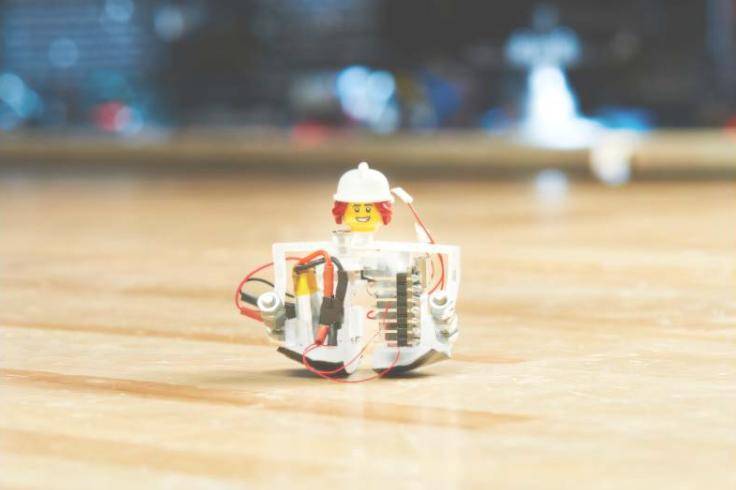
Este robot, cariñosamente llamado “Zippy” por sus creadores, es el último resultado de un proyecto liderado por Aaron Johnson y Sarah Bergbreiter de la Carnegie Mellon University. El proyecto busca entender el movimiento a pequeña escala para fabricar robots caminantes miniatura más funcionales.
“En un mundo diseñado para humanos, los robots bípedos pueden atravesar terrenos irregulares y esquivar objetos más fácilmente que los robots con ruedas”, explicó el profesor de ingeniería mecánica Johnson. “Por lo tanto, hemos estado investigando cómo eliminar mecanismos de caminar complejos para fabricar robots bípedos simples”.
Steven Man, uno de los autores principales de este estudio, que se publicará en la IEEE International Conference on Robotics and Automation de este año, enfatizó la complejidad e importancia de los robots con patas miniatura.
“Pueden entrar en espacios estrechos donde los humanos u otros robots no pueden acceder. Zippy puede servir como recurso para búsqueda y rescate de emergencia, inspección industrial, e incluso desplegarse en regiones con condiciones geológicas interesantes para investigación científica”, dijo.
Los estudiantes de pregrado Soma Narita y Josef Macera también son autores principales del estudio; ayudaron a diseñar Zippy, cuyo prototipo es el robot bípedo manipulable anterior del equipo, Mugatu, que tiene pies redondos y un solo actuador en la cadera.
Este robot bípedo camina levantando la pierna delantera y desplazando el centro de gravedad hacia adelante. El momento generado por este movimiento, junto con sus pies delanteros redondos, crea suficiente espacio para que la otra pierna de Zippy se balancee y dé un paso completo. Debido a su pequeño tamaño, Zippy usa topes mecánicos duros adicionales como límites para las articulaciones de la cadera, en lugar de servomotores.
“El tamaño compacto de Zippy, combinado con nuestros ajustes mecánicos cuidadosamente diseñados, le permite caminar a una velocidad impresionante de 10 longitudes de pierna por segundo, equivalente a un adulto promedio caminando a 19 millas por hora. Esto hace que Zippy no solo sea el más pequeño, sino también el robot bípedo autónomo eléctrico más rápido”. dijo la profesora de ingeniería mecánica Bergbreiter.
En el futuro, el equipo planea agregar sensores como cámaras a Zippy para que pueda localizarse y navegar autónomamente en entornos. Con capacidades de localización, múltiples robots pueden desplegarse en colaboración, formando un enjambre para realizar tareas de inspección o rescate en entornos peligrosos.