es.wedoany.com Noticia: El brazo robótico clave de la Estación Espacial Internacional, el "Canadarm2", está fuera de servicio debido a una avería en un componente de la articulación de la muñeca, y se espera que las reparaciones lleven varias semanas. El sistema se atascó durante una operación rutinaria el 27 de mayo. En una publicación de blog del 10 de junio, la NASA reveló que el brazo robótico mostraba una corriente elevada en el motor de la articulación de la muñeca y que el movimiento no se producía según lo previsto.
El brazo robótico cumplió 25 años de servicio en la Estación Espacial Internacional (ISS) en abril. Actualmente se encuentra en una posición estable, a la espera de una caminata espacial programada para el 30 de junio. Tras consultar con la Agencia Espacial Canadiense (CSA, que financia el brazo robótico y apoya sus operaciones con MDA Space), se decidió que es necesario reemplazar la articulación afectada mediante una caminata espacial. La CSA escribió en una actualización de su sitio web que el Canadarm2 fue diseñado teniendo en cuenta este tipo de problemas potenciales, y está compuesto por múltiples segmentos que pueden extraerse y reemplazarse en el espacio. Dado que los componentes eventualmente necesitan ser reemplazados, la CSA planificó con antelación el envío de repuestos clave a la estación espacial. En 2017, una "mano" del brazo robótico fue reparada de manera similar después de mostrar signos de desgaste normal. Ya hay repuestos disponibles en la estación espacial.
La NASA planea celebrar una conferencia de prensa en una fecha por determinar para discutir esta caminata espacial y proporcionar más información. Dos astronautas que podrían realizar la misión provienen de la tripulación de la Expedición 74 (Expedition 74) del segmento estadounidense de la estación espacial, e incluyen a Chris Williams, Jessica Meir y Jack Hathaway de la NASA, así como a Sophie Adenot de la Agencia Espacial Europea (European Space Agency, ESA).

Restaurar el funcionamiento del Canadarm2 es crucial para atracar algunas naves de carga en la estación espacial y realizar tareas de mantenimiento del complejo orbital, naves que transportan alimentos, equipos y otros suministros para los astronautas. El último atraque ocurrió en abril, cuando Williams controló el brazo robótico y Hathaway brindó apoyo para capturar la nave Cygnus XL de Northrop Grumman. El brazo robótico no fue diseñado originalmente para la llegada de naves, pero logró su 50.ª "captura cósmica" en 2024, aunque desde este año ha superado su vida útil de diseño en 10 años.
En las últimas décadas, el control de la misión se ha transferido cada vez más a tierra, incluyendo la NASA en Houston y la sede de la CSA cerca de Montreal, Quebec. Solo los controladores canadienses apoyan más de 100 días de trabajo al año para el Canadarm2 y otros robots canadienses de la ISS (incluyendo Dextre, la "mano" del brazo canadiense), que incluyen tareas como recoger equipos y transferir experimentos. Los robots de la CSA en la estación espacial representan su parte en el acuerdo de financiación de la ISS, lo que permite que los astronautas y proyectos científicos de la CSA vuelen al espacio. El próximo astronauta de la CSA en ir allí es Josh Kutryk, que volará en la Crew-13 de SpaceX como muy pronto en septiembre; el anterior fue David Saint-Jacques en 2018-19.
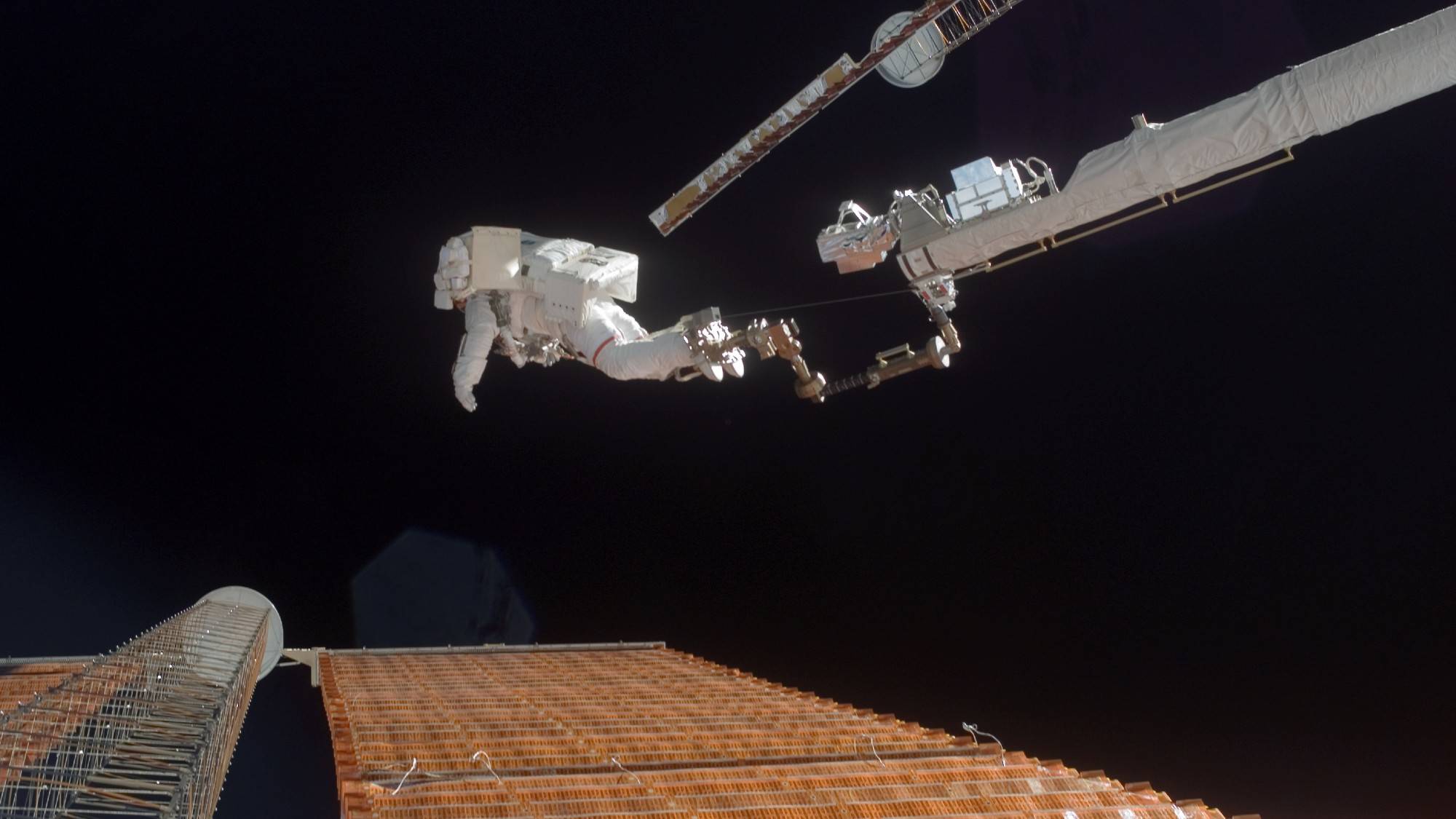
El Canadarm2 es parte de una serie de brazos robóticos espaciales canadienses, cuyos orígenes provienen en parte de la tecnología del Consejo Nacional de Investigación de Canadá (Canada's National Research Council), que alguna vez respaldó las primeras antenas de satélites y las "patas" del módulo lunar Apolo. La primera generación del Canadarm (Canadarm) voló por primera vez en la segunda misión del transbordador espacial estadounidense en 1981. El Canadarm2 ayudó a construir la ISS y apoya las actividades de la estación espacial, mientras que la próxima generación, el Canadarm3, está en construcción para apoyar el programa Artemisa (Artemis), en el que el astronauta de la CSA Jeremy Hansen voló alrededor de la Luna en la misión Artemisa 2 en abril. Uno de los momentos más importantes en la historia del Canadarm2 fue la reparación de emergencia de un panel solar desgarrado en 2007, cuando el astronauta de la NASA Scott Parazynski, montado en el brazo robótico y una extensión de "pluma" robótica canadiense, alcanzó el componente distante y electrificado para repararlo.
Este artículo es compilado por Wedoany, las citas de la IA deben indicar la fuente «Wedoany»; si hay alguna infracción u otro problema, por favor notifícanos a tiempo, este sitio lo modificará o eliminará. Correo electrónico: news@wedoany.com