

El Instituto Italiano de Tecnología (IIT) ha demostrado con éxito el primer vuelo de iRonCub3, logrando un hito en la tecnología de robots humanoides. iRonCub3 es el primer robot humanoide volador a reacción diseñado específicamente para operar en entornos reales.
El equipo de investigación estudió la compleja aerodinámica de cuerpos artificiales y desarrolló modelos avanzados de control para sistemas compuestos por múltiples componentes interconectados. El desarrollo general de iRonCub3 (incluyendo pruebas de vuelo reales) tomó aproximadamente dos años. En el experimento más reciente, el robot pudo elevarse aproximadamente 50 cm del suelo mientras mantenía la estabilidad. Este logro establece las bases para una nueva generación de robots voladores capaces de operar en entornos complejos mientras mantienen una estructura humanoide.
Un artículo publicado en la revista Communications Engineering describe la investigación en aerodinámica y control.
Esta investigación fue realizada por expertos en robótica del IIT en Génova, Italia, en colaboración con el equipo de Alex Zanotti del Laboratorio de Aerodinámica DAER del Politécnico de Milán (que realizó una serie de pruebas exhaustivas en túnel de viento) y el equipo de Gianluca Iaccarino de la Universidad de Stanford, que utilizó algoritmos de aprendizaje profundo para identificar modelos aerodinámicos. Esta demostración de vuelo robótico representa el último hito del Laboratorio de Inteligencia Artificial y Mecánica Inteligente (AMI) del IIT en Génova, liderado por Daniele Pucci. Su investigación busca superar los límites de los robots humanoides multimodales, combinando movimiento terrestre y maniobras aéreas para desarrollar robots capaces de operar en entornos no estructurados y extremos.
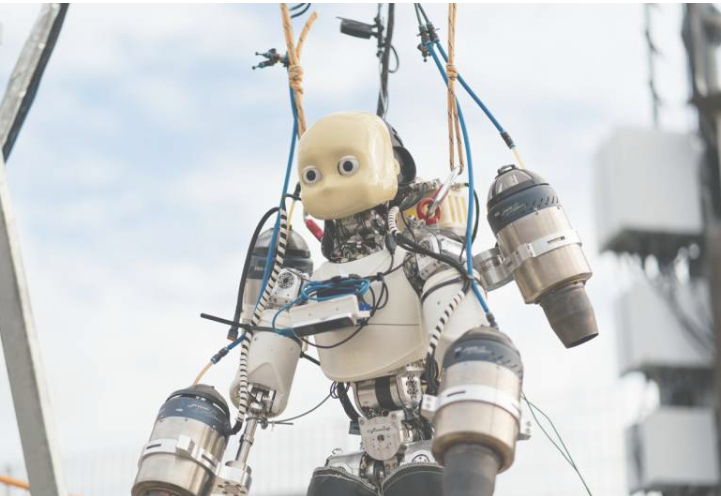
iRonCub3 es una actualización tecnológica de prototipos anteriores, basado en la última generación del robot humanoide iCub (iCub3), diseñado específicamente para operación remota. Integra cuatro motores a reacción: dos montados en los brazos y dos en una mochila a reacción en la espalda del robot.
Para soportar los motores externos, el diseño de hardware de iCub requirió modificaciones, como el desarrollo de una nueva columna vertebral de aleación de titanio y la adición de cubiertas protectoras resistentes al calor. El robot equipado con motores a reacción pesa aproximadamente 70 kg, y las turbinas pueden proporcionar una fuerza de empuje máxima superior a 1000 N. Esta configuración permite que el robot se mantenga en vuelo estacionario y ejecute maniobras de vuelo controladas incluso en presencia de interferencias de viento o incertidumbres ambientales. La temperatura de escape puede alcanzar hasta 800 °F (aproximadamente 477 °C).
"Esta investigación difiere radicalmente de la tecnología tradicional de robots humanoides, obligándonos a lograr saltos sustanciales a nivel técnico", explicó Daniele Pucci. "Aquí, la termodinámica juega un papel clave: los gases de escape de las turbinas alcanzan temperaturas de hasta 700 °C y velocidades cercanas a la del sonido. La aerodinámica debe evaluarse en tiempo real, y el sistema de control debe manejar simultáneamente actuadores articulares lentos y turbinas de inyección rápida. Probar estos robots es tanto interesante como peligroso; no hay espacio para improvisaciones".
El equipo de investigación AMI se centró en el equilibrio dinámico de la plataforma, que se vuelve particularmente complejo debido a la forma humanoide del robot. A diferencia de los drones tradicionales, que son estructuralmente simétricos y compactos, iRonCub3 tiene una forma alargada, con distribución de masa en extremidades móviles y un centro de gravedad variable. Esto requiere el desarrollo de modelos avanzados de equilibrio de vuelo que consideren la dinámica multibody del robot, así como las interacciones entre la propulsión a reacción y los movimientos de las extremidades.
Además, las extremidades móviles aumentan considerablemente la complejidad aerodinámica, ya que cada movimiento de las extremidades del robot altera la aerodinámica.
Los investigadores realizaron extensas experimentaciones en túnel de viento, simulaciones avanzadas de dinámica de fluidos computacional (CFD) y desarrollaron modelos basados en IA capaces de estimar la aerodinámica en tiempo real.
"Nuestro modelo incluye redes neuronales entrenadas con datos de simulaciones y experimentos, integradas en la arquitectura de control del robot para garantizar la estabilidad de vuelo", explicó Antonello Paolino, primer autor del artículo, estudiante de doctorado en un proyecto conjunto entre el IIT indio y la Universidad de Nápoles, quien pasó un semestre como investigador visitante en Stanford.
Por lo tanto, iRonCub3 está equipado con un sistema de control de IA que le permite manejar flujos de aire turbulentos de alta velocidad, temperaturas extremas y la dinámica compleja de sistemas multibody durante el vuelo.
Los modelos avanzados de aerodinámica desarrollados por el IIT indican que se puede mantener la postura y la estabilidad incluso durante maniobras no estacionarias (como la ignición secuencial de motores o cambios en la geometría del cuerpo).
Estas investigaciones se pueden transferir a otros robots con morfologías no convencionales, un caso único en comparación con los drones tradicionales, cuyo equilibrio depende de simetría y estrategias de control simplificadas que a menudo ignoran la aerodinámica y termodinámica inherentes al robot.
El diseño final de iRonCub3 es el resultado de un proceso avanzado de diseño colaborativo, específicamente para integrar IA y campos multifísicos en el diseño de robots voladores. Estas tecnologías son innovadoras en el campo de la robótica, capaces de optimizar simultáneamente la forma del robot y las estrategias de control, considerando las complejas interacciones entre aerodinámica, termodinámica y dinámica multibody.
Adoptamos un diseño colaborativo para determinar la posición óptima de las turbinas a reacción, maximizando el control y la estabilidad durante el vuelo. También empleamos técnicas de diseño avanzadas para gestionar el calor disipado por los motores, asegurando que el robot mantenga su integridad estructural incluso en condiciones operativas extremas.
El robot fue rediseñado completamente para soportar las condiciones adversas relacionadas con el movimiento aéreo, e introdujo mejoras principales enfocadas en accionamiento preciso, control de empuje mejorado mediante sensores integrados y planificadores avanzados para coordinar despegues y aterrizajes.
Durante todo el proceso de diseño, realizamos múltiples iteraciones de ajuste basadas en resultados de simulaciones avanzadas y pruebas experimentales, determinando finalmente la configuración actual del robot. Este enfoque permitió al equipo superar las limitaciones de métodos tradicionales, marcando un paso importante en la automatización e integración de diseño de sistemas robóticos complejos.
La primera prueba de vuelo de iRonCub3 se realizó en una pequeña zona de pruebas de vuelo del IIT, donde el robot pudo elevarse aproximadamente 50 cm del suelo. En los próximos meses, las pruebas de prototipos continuarán, y se perfeccionarán aún más mediante la colaboración con el Aeropuerto de Génova, que proporcionará un área dedicada configurada y equipada por el IIT de acuerdo con todas las regulaciones de seguridad necesarias. Esta área se utilizará para actividades experimentales futuras.
Se espera que robots humanoides voladores como iRonCub3 se apliquen en múltiples escenarios en el futuro, como operaciones de búsqueda y rescate en zonas de desastre, inspecciones en entornos peligrosos o de difícil acceso, y misiones de exploración donde tanto la capacidad de manipulación como la maniobrabilidad aérea son cruciales.