

Una investigación liderada por la Universidad de Surrey, publicada en la revista Nature Machine Intelligence, representa un nuevo avance en la captura y manipulación de objetos por parte de robots. El estudio demuestra que un nuevo método antideslizante puede mejorar significativamente la capacidad de los robots para capturar y manipular objetos frágiles, resbaladizos o asimétricos, lo que promete sentar las bases para una automatización más segura y confiable en industrias como la manufactura y la atención sanitaria.
Los investigadores de la Facultad de Ciencias de la Computación e Ingeniería Electrónica de la Universidad de Surrey han demostrado en este estudio su método innovador: permitir que los robots, al igual que los humanos, predigan cuándo un objeto podría resbalarse y ajusten sus acciones en tiempo real para prevenirlo. Este enfoque biomimético supera las estrategias tradicionales de agarre por fuerza, permitiendo que los robots muevan y mantengan un agarre firme de manera más inteligente sin simplemente apretar con fuerza.
Tradicionalmente, los robots se entrenan solo en función de la fuerza de agarre, lo que puede ser ineficaz o incluso dañino al manejar objetos frágiles. Con el nuevo método, los robots pueden ajustar automáticamente sus acciones, similar a cómo un humano instintivamente corrige la posición de las manos al sostener un plato que comienza a resbalar, asegurando la seguridad del objeto.
El Dr. Amir Jafari, subprofesor de robótica, afirma que esto podría cambiar el panorama futuro de la automatización, con aplicaciones que abarcan desde el manejo de instrumentos quirúrgicos en atención sanitaria hasta el ensamblaje de componentes precisos en manufactura, la clasificación de paquetes voluminosos en logística y la asistencia en la vida diaria en el hogar.
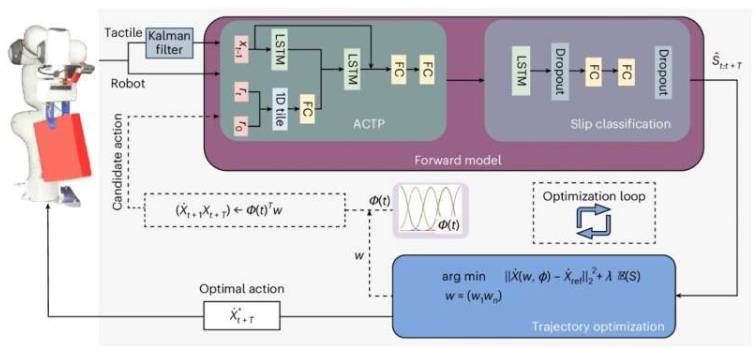
Esta investigación fue realizada conjuntamente por la Universidad de Surrey, la Universidad de Lincoln, la Universidad Estatal de Arizona, el Instituto Coreano de Ciencia y Tecnología (KAIST) y el Laboratorio de Investigación de Cambridge de Toshiba Europe, demostrando y cuantificando por primera vez la efectividad de la regulación de trayectorias en la prevención de resbalones tanto en humanos como en robots. Los resultados muestran que un sistema de control predictivo impulsado por un “modelo táctil hacia adelante” aprendido permite que los robots predigan situaciones de resbalón y analicen continuamente los movimientos planificados.
Además, los investigadores han confirmado que el sistema puede manejar objetos y trayectorias no entrenadas, mostrando potencial para su aplicación efectiva en entornos del mundo real. El Dr. Amir Jafari indica que este método tiene un potencial significativo en diversas aplicaciones de robots industriales y de servicio, abriendo nuevas oportunidades para la integración de robots en la vida cotidiana, y espera que los resultados inspiren investigaciones futuras para impulsar el desarrollo en el campo de la robótica.