

El equipo del profesor He Bin de la Universidad Carnegie Mellon ha logrado un avance importante en el campo de las interfaces cerebro-máquina (BCI) no invasivas. El nuevo sistema desarrollado por el equipo puede decodificar en tiempo real las intenciones de movimiento de dedos individuales a través de señales de electroencefalograma (EEG) y lograr un control preciso de prótesis mecánicas. Este resultado de investigación se publica en la revista Nature Communications.
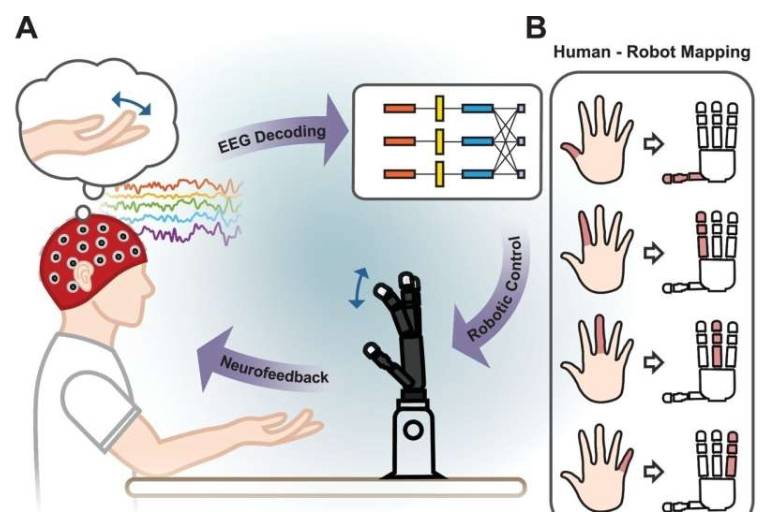
El equipo del profesor He Bin adoptó una estrategia de decodificación de aprendizaje profundo y un mecanismo de ajuste fino de redes, logrando exitosamente que los sujetos controlen con la mente los dedos mecánicos para completar tareas de coordinación de dos y tres dedos. El sistema se basa en dos modos: ejecución motora e imaginería motora, proporcionando nuevas soluciones de asistencia para la rehabilitación de pacientes con discapacidades en extremidades.
"Mejorar la función manual es crucial para las personas con discapacidades", señaló el profesor He Bin, "incluso un pequeño progreso puede mejorar significativamente la calidad de vida. Sin embargo, la decodificación de movimientos de dedos individuales con señales de EEG no invasivas ha sido un gran desafío".
Aunque las BCI invasivas tradicionales tienen alta precisión de control, requieren la implantación quirúrgica de electrodos, lo que conlleva riesgos de infección y mantenimiento complejo. En comparación, las BCI basadas en EEG no requieren cirugía, siendo más seguras y convenientes. El equipo de investigación previamente ha logrado avances en el control de drones y brazos mecánicos; esta vez, el control a nivel de dedos eleva las aplicaciones a nuevas alturas.
Esta tecnología promete en el futuro lograr operaciones más finas, como escribir en un teclado y otras actividades diarias. He Bin señaló: "Esta investigación eleva el valor clínico de las BCI no invasivas, permitiendo su servicio a un público más amplio, desde la comunicación básica hasta el control de movimientos complejos".