La Universidad de Buffalo ha logrado un importante avance en la percepción táctil robótica con el desarrollo de nuevos textiles electrónicos (e-textiles) que podrían resolver el problema de la falta de buen tacto en los robots. Los resultados de la investigación se publicaron el 30 de julio en la revista Nature Communications.
Durante mucho tiempo, muchos robots han tenido dificultades para realizar habilidades humanas básicas como recoger objetos caídos o controlar la fuerza de agarre, a pesar de que los científicos les han dotado de cámaras y otras herramientas para mejorar su percepción. Hasta ahora no se había encontrado una solución simple y económica.
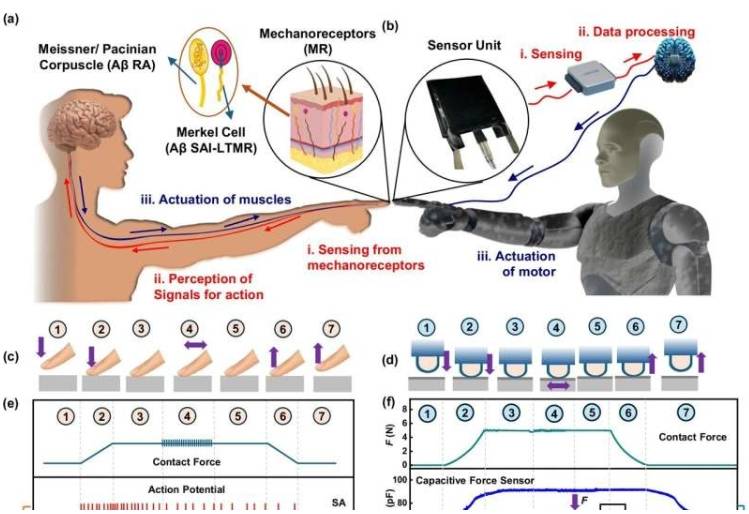
Los nuevos textiles electrónicos desarrollados en la Universidad de Buffalo imitan la forma en que los nervios de la mano humana perciben presión y deslizamiento al agarrar objetos. El Dr. Jun Liu, profesor asistente del Departamento de Ingeniería Mecánica y Aeroespacial de la Escuela de Ingeniería y Ciencias Aplicadas de la Universidad de Buffalo (y miembro principal del Instituto RENEW, autor correspondiente del estudio), explicó que esta tecnología puede aplicarse a tareas de fabricación como ensamblaje y embalaje, a escenarios de colaboración humano-robot y a la mejora de herramientas quirúrgicas robóticas y prótesis. El equipo incluye al Dr. Ehsan Esfahani, profesor asociado del mismo departamento, varios estudiantes de la Universidad de Buffalo y un exdoctorando del grupo del Dr. Liu (actualmente investigador posdoctoral en la Universidad de Chicago).
El primer autor del estudio, el estudiante de doctorado Wasin Kawsher del grupo de Liu, afirmó que este sensor es similar a la piel humana: flexible y altamente sensible, capaz no solo de detectar presión, sino también deslizamientos y movimientos sutiles de objetos. Este avance podría cambiar la forma en que los robots, las prótesis y los sistemas de interacción humano-máquina interactúan con el mundo que los rodea.
Los investigadores integraron el sistema de sensores en un par de dedos robóticos impresos en 3D montados en un agarre robótico flexible desarrollado por el equipo de Esfahani. Esfahani señaló que, tras integrar los sensores, el agarre robótico puede detectar deslizamientos y ajustar dinámicamente la compliancia y la fuerza de agarre, realizando tareas manuales previamente difíciles, como sostener un objeto pesado de cobre que se desliza de los dedos: el agarre detecta el deslizamiento y aprieta inmediatamente. También afirmó que este sensor es un componente clave para acercar la función de las manos mecánicas a la de las humanas, ya que utiliza el efecto triboeléctrico: el roce producido por el leve movimiento de un objeto genera corriente continua.
Las mediciones mostraron que el sistema de sensores tiene un tiempo de respuesta comparable al humano, entre 0,76 y 38 milisegundos según el experimento, mientras que los receptores táctiles humanos suelen reaccionar entre 1 y 50 milisegundos. El Dr. Liu comentó que la velocidad del sistema es impresionante, cumple con los estándares biológicos establecidos por el rendimiento humano y responde más intensamente cuanto más rápido o intenso es el deslizamiento, lo que facilita la creación de algoritmos de control para que los robots actúen con precisión.
Actualmente, el equipo planea realizar pruebas adicionales al sistema de sensores, incluyendo la integración de inteligencia artificial de aprendizaje por refuerzo para aumentar aún más la destreza robótica.